This study quantifies the impact of atmospheric rivers (ARs) on rainfall in New Zealand. Using daily rainfall records from 654 rain gauges and the ERA-Interim and ERA-5 reanalysis, we investigate the contribution of ARs to the annual and seasonal rainfall totals and extreme rainfall events between 1979–2018 across the country. Results indicate that these filamentary synoptic features play an essential role in regional water resources and are responsible for many extreme rainfall events on the western side of mountainous areas and northern New Zealand. Depending on the season in these areas, 40–86% of the rainfall totals and 50–98% of extreme rainfall events are shown to be associated with ARs, with the largest contributions predominantly occurring during the summer. Furthermore, the median daily rainfall associated with ARs is 2–3 times that associated with other storms. The results of this study extend the knowledge of the critical roles of ARs on hydrology and highlight the need for further investigation of the hydrological hazards caused by ARs in New Zealand.
Research Article
The Impact of Atmospheric Rivers on Rainfall in New Zealand
https://doi.org/10.21203/rs.3.rs-130393/v1
This work is licensed under a CC BY 4.0 License
Journal Publication
published 12 Mar, 2021
You are reading this latest preprint version
Atmospheric rivers (ARs) are global phenomena primarily occurring in the midlatitudes, distinguished by filamentary regions of strong horizontal water vapour transport in the atmosphere1. Firstly described by Newell et al.2, ARs are synoptic-scale filaments representing 4 or 5 largest water vapour fluxes that occur between the midlatitudes and the tropics on any given day, and the length of an AR is generally five times its width. ARs are often linked to extratropical cyclones and fronts3,4 that are a key mechanism of precipitation5,6 and play a critical role in extreme precipitation events7 in the mid-latitudes. As part of extratropical cyclones and fronts, ARs have significant hydrological impacts when making landfall for most mid-latitude regions globally, including extreme precipitation events8 and the frequency of the occurrence of droughts and floods9.
ARs significantly contribute to precipitation totals and produce heavy orographic precipitation when passing mountainous regions in the midlatitudes. Notable contributions of ARs to precipitation totals have been documented on the west coast of North America10,11, the central United States and western Europe12, the southern south America13, and South Africa14. ARs can contribute to more than 50% of annual or seasonal precipitation totals (winter in particular) for these regions. Further, there is a strong connection between the heavy precipitation events and ARs in these regions13–17. For example, storm events (3-day precipitation total exceeds 400 mm) between the 1998–2008 water year are all associated with ARs in California10.
Rainfall caused by the combined effect of extratropical cyclones and their associated fronts with orographic lifting is typical in New Zealand18. For example, the highest annual precipitation totals in New Zealand (over 10,000 mm) occurs in the Southern Alps19 because this extended mountain range provides a significant barrier of the prevailing airflows. Due to the global general circulation, the overall seasonal pattern of rainfall in the North Island sees higher rainfall in winter and lower rainfall in summer, whilst the South Island sees the opposite seasonal pattern. The combined effect also determines the location and intensity of heavy rainfall events in New Zealand, generally on the western side of mountainous areas and northern New Zealand20.
In New Zealand, several global AR studies have noted a considerable occurrence of landfalling ARs and their association with heavy precipitation8,21,22 and the frequency of drought and flood occurrences9. However, these global studies are unable to reflect regions that highly impacted by ARs, especially considering the diverse orography in New Zealand. Additionally, AR frequency and strength is projected to increase by 60% and 20%, respectively, under the most severe future climate scenario in the southern midlatitudes23. To this end, the hydrological impact of ARs is likely to be altered in New Zealand. Therefore, evaluating the impact of ARs on rainfall at a local scale in New Zealand is essential, given the local climate features, the critical role that ARs play in the global water cycle and mid-latitude weather and hydrology, and the changing climate.
In this study, we hypothesize that this evaluation will be useful for better understanding the causes of both the spatial distribution of annual and seasonal rainfall totals and heavy rainfall events across the country to provide more useful information for the assessment of climate change impacts. The objectives of the present study are (1) to investigate the climatology of ARs in New Zealand; (2) to evaluate the fraction of seasonal and annual rainfall totals linked with ARs; (3) to compare the intensity of AR rainfall and non-AR rainfall, and the association between the ARs and heavy rainfall events.
Climatology of ARs over New Zealand
Due to the higher spatial resolution of the ERA-interim dataset, this section presents the results using ERA-interim ARs over New Zealand from 1979 to 2018 (39 years), results from ERA-5 are shown in the supplementary documentation. Note that the analysis in this section only represents ARs at some moment of their life cycle as the temporal resolution of both reanalysis datasets is 6 hours.
The frequency of AR days and the coefficients of variation (CV) of AR days for each grid cell are shown in Fig. 1 (ERA-Interim) and Supplementary Fig. 1 (ERA5). Generally, there are 70 to 90 days per year with AR occurrence across New Zealand, and the South Island experiences more AR days than the North Island (Fig. 1a and Supplementary Fig. 1a). The frequency of AR days is higher in the warm seasons than in cold seasons, and the South Island experiences more AR days than the North Island in summer, yet fewer AR days in winter (Fig. 1b-e and Supplementary Fig. 1b-e). The interannual variation for seasonal AR frequency (0.2–0.4) is notably higher than the annual scale (generally less than 0.1), and cold seasons experience larger variation compared with warm seasons (Fig. 1f-j and Supplementary Fig. 1f-j).
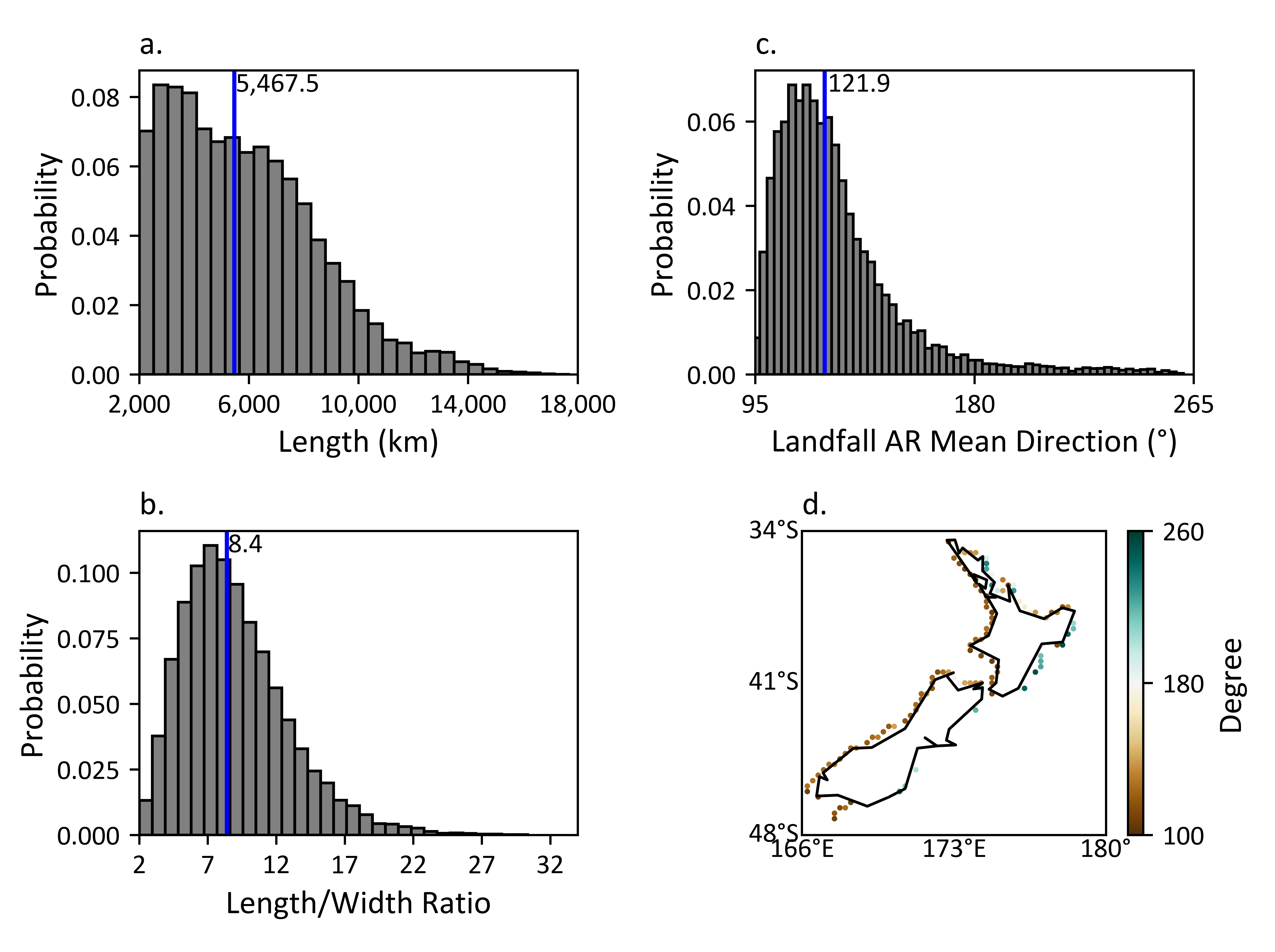
Geometric characteristics and the mean direction of landfalling ARs are shown by the histograms and maps of Fig. 2 (ERA-Interim) and Supplementary Fig. 2 (ERA5). Results from the two datasets generally agree with each other, despite some small differences. The long and narrow feature of landfalling ARs is notable, the median of the length and the length/width ratio is about 5,730 km (5,500 km) and 8.9 (8.4) for ERA-Interim (ERA-5), respectively. In some cases, ARs can be longer than 10,000 km with the length/width ratio greater than 20. The landfalling ARs commonly have a southwest direction, the median of the mean direction is about 121.5° (121.9°) for ERA-Interim (ERA-5). Some landfalling ARs also display a southeast direction. Figure 2d and Supplementary Fig. 2d show the mean direction of detected landfalling ARs at their corresponding landfall locations. Overall, ARs commonly approach the west side of New Zealand with a southwest direction, and in some cases with a southeast direction on the east side.
Contribution of ARs to rainfall totals
This section examines the impact of detected ARs on rainfall totals across New Zealand. Results from ERA-interim and ERA-5 are shown in Figs. 3–4 and Supplementary Figs. 3–4, respectively.
Average annual and seasonal rainfall totals are shown in Fig. 3a–e. Generally, highest rainfall totals occur on the western side of the mountain ranges and mountain peaks across New Zealand. The highest annual and seasonal rainfall totals are recorded on the west side of the mountain range in the South Island (the Southern Alps). Seasonality in rainfall totals is notable in North Island, being highest in the winter and lowest in summer.
The average fraction of annual and seasonal rainfall totals linked with ARs for each rain gauge are shown in Fig. 3f–j and Supplementary Fig. 3a-e. Frequency of wet AR days is shown in Fig. 3k-o and Supplementary Fig. 3f-j. The annual and seasonal fraction of rainfall totals linked with ARs is mostly over 50% except during winter on the west side of mountain ranges, mountain peaks, and northern North Island. For these areas, the highest fractions are recorded in summer (75–86%) and the lowest recorded in winter (15–40%). Seasonal frequency of wet AR days in these areas ranging from 5–31 days, with the highest frequency in summer and lowest in winter (see Fig. 3k-o and Supplementary Fig. 3f-j).
Impact of ARs on extreme rainfall events
The ratio of the median daily AR rainfall over non-AR rainfall at the annual and seasonal scales are shown in Fig. 4a–j (ERA-Interim) and Supplementary Fig. 4a-j (ERA-5). Interestingly, AR storms are found to produce more than 2 times more daily rainfall than non-AR storms at most stations, and significantly more than three times for the west side of mountainous areas and northern New Zealand. The ratios in winter are also notably high, particularly for some stations where the ratio can be over 20.
The connection of the most intense rainy days between ARs is explored by considering those days that rainfall exceeds the 90th percentile values of the series of daily rainfall. Figure 4k–o(ERA-Interim) and Supplementary Fig. 4k–o (ERA-5) show the annual and seasonal fractions of those intense rainy days associated with ARs at each station. Generally, 50–98% extreme rainfall events are associated with AR conditions on the west side of mountainous regions and northern New Zealand, depending on the season. The highest fraction for each station in these areas occurs in summer, whereby some exhibit values over 90% and 80% in the South and North Island, respectively.
The investigation of the impact of ARs on rainfall in this study is a major step toward understanding the hydrology and extreme rainfall events in New Zealand. New Zealand is an AR-highly impacted country8,9,22. In this study, the impact of ARs on rainfall was evaluated using two atmospheric reanalysis datasets and a network of station rainfall data, combined with an automated AR detection algorithm introduced by Guan and Waliser22. Overall, ARs are found to have a strong hydrological impact over western areas of mountain ranges and mountain peaks, and northern New Zealand. Note that the discussion below focuses only on these areas.
The filamentary synoptic feature is notable as the median length of landfalling ARs is more than 5,000 km, and the median ratio of length/width is about 9. Landfalling ARs generally have a southeastward direction, but some exhibit a southeast direction along some coasts. The basic landfalling ARs characteristics found across New Zealand generally agree with results in Guan and Waliser 22.
Overall, 40–86% of the annual and seasonal rainfall totals accumulated only within several 10 wet AR days, depending on the location of the rain gauge and season. This indicates that AR storms in these regions play a key role in water resources, and particularly true for the western coast of the Southern Alps where 50–65% of annual rainfall totals (nearly 7,000 mm) accumulated within 60–82 wet AR days. Additionally, the highest AR contribution occurs in summer, which is also the season that the western coast of the Southern Alps receives the highest amount of rainfall. The results suggest that ARs and orography largely determine the water availability in these regions.
AR storms are more intense than non-AR storms year-round and found to be able to produce 2–20 times the non-AR rainfall depending on the rain gauge location and season. Particularly, cold-season AR storms are more intensive. The connection between the extreme rainfall events and ARs are notably high, ranging from 50–98% across the rain gauge locations and seasons. Indeed, the percentage is over 90% in some areas on the west side of the Southern Alps in summer. As ARs are often related to fronts, the impact of ARs on extreme rainfall events in this study agrees with Catto and Pfahl7, although the 99th threshold was used in their study.
Further, results in this study suggest a potential connection between the hydrological droughts and floods in northern New Zealand and where the orography dominates the weather progression. Droughts and floods are the most costly and damaging natural hazards in New Zealand24. Under changing climate conditions, the frequency and magnitude of floods are likely to increase as a result of increased frequency and intensity of extreme rainfall in New Zealand25. Climate change is expected to also lead to increases in the frequency of droughts in most North Island26, including regions where ARs are the major contributor to water resources. Moreover, climate change is suggested to result in a 60% and 20% increase in the AR frequency and strength in the southern midlatitudes, respectively23. Therefore, further work will investigate the connection between hydrological hazards and ARs focusing on regions exposed to both ARs and these hazards, for a better assessment of climate change impact on natural hazards.
Reanalysis and station rainfall data
It is common to employ more than one dataset to assess the robustness of AR detection techniques. Datasets used to identify ARs are the European Centre for Medium-Range Weather Forecasts (ECMWF) Interim (ERA-interim)27 and the most recent reanalysis dataset version from ECMWF, namely the ERA-5 reanalysis project28. Atmospheric reanalysis data between 1979 and 2018 from ERA-interim and ERA-5 at 0.125°×0.125° and 0.25°×0.25° horizontal grid resolution were retrieved, respectively. Data used are 6-hourly specific humidity and zonal wind and meridional wind components at 20 vertical pressure levels (300hPa to 1000hPa), and land-sea mask. The integrated water vapour transport (IVT) vector at each grid cell was calculated in an Eulerian framework13,17 as:

where q, u, ν and are specific humidity (kg kg-1), zonal and meridional vectors (m s‑1), respectively; g is the gravitational acceleration (9.81 m s-2), and dp (Pa) is the pressure difference between two adjacent atmospheric pressure levels. Note that all parameters in equation (2) and (3) were collected at discrete atmospheric pressure levels from the selected datasets. According to Guan and Waliser22, the median length of global 1997-2014 ARs is about 3,665.1km. For the ARs detected in the Southern Hemisphere, ARs commonly have a southeastward direction with a median degree of 120.6°, and the median latitude of the AR equatorward end, centroid, and the poleward end is 28.5°S, 41.1°S, and 49.5°S respectively. Considering that the longitude length of a degree at 49.5°S is approximately 72km and the first eastward meridian line across New Zealand is at about 166°E. Therefore data retrieved over the 0-70°S and 100°E-120°W domain is considered adequate (166°E– 100°E = 66°, 66° × 72km/degree = 4,725km > 3,665.1 km).
Station-based daily rainfall totals were obtained from New Zealand’s national climate database web system hosted by the National Institute of Water and Atmospheric Research (NIWA). Note that the periods of records differ among sites, and the observation times of the day are 2100 UTC (2000UTC) during the wintertime (summertime). Sites with less than 10 years of daily rainfall records between (September–August) 1979 to 2018 and completeness less than 100% were excluded because the lack of daily rainfall data could potentially lead to under- or overestimations in the hydrological impacts of ARs. Given these conditions, a total of 654 stations with a mean length of 19 years were selected over the whole country (see Fig. 5).
AR detection method
The AR detection algorithm introduced in Guan and Waliser22 was used, and ARs were detected based on the ERA-interim and ERA-5 reanalysis dataset, respectively. IVT and IVT threshold (monthly 85th percentile within a 5-month window centred at that month) for each grid cell and the land-sea mask from the two datasets are the inputs. Note that the land-sea mask values were adjusted only to contain grid cells represent New Zeland landmasses (1s represent New Zealand landmasses, 0s refer to others). Briefly, criteria of the AR detection algorithm include the IVT magnitude at each grid cell within a contiguous region being above the IVT threshold and a fixed limit (IVT > 100 kg m-1 s-1) for that grid cell, the apprepicable poleward direction of the AR (IVTy >50 kg m-1 s-1), and the length of an AR greater than 2,000km with a length/width ratio greater or equal to 2. Outputs from the algorithm include the variables of shape, axis, and landfall location of the ARs in netCDF files and detailed characteristics of landfalling ARs in text files. The AR shape variable was used to compute the AR area, the axis was used to calculate the AR length, and the width was calculated as the area divided by the length. The landfall location was marked the first grid cell that the AR axis intersects the coastlines alone the IVT vector direction and that AR was labelled as a landfalling AR. The content in Fig. 2 and Supplementary Fig. 2 is based on the characteristics of landfalling ARs. The detailed description of the AR detection procedure and criteria of this technique are in Guan and Waliser22. Fig. 6 shows one of the strongest detected ARs passing New Zealand.
AR frequency and AR impacts on rainfall
The AR frequency was calculated as the average number of days per year that an AR was detected for each grid cell. The calculation was based on the shape of detected ARs. For example, at least one of the four reanalysis time steps per day meeting the AR detection criteria for it to be counted as an AR day13. Seasonal AR frequency is expressed as the anomalies from the mean seasonal AR days. The coefficients of variation (CV) for annual and seasonal AR days were calculated to evaluate the interannual variation of AR frequency.
Consider a given station with daily rainfall records (measured at 2000 UTC or 2100 UTC) on 15 June 2000. To determine if the rainfall should be associated with an AR, the first step is to search for AR conditions (based on AR shape) at the four grid points that enclosed the station site between 2000 UTC (2100 UTC) 14 June 2000 and 2000 UTC (2100 UTC) 15 June 2000. If any of the four ERA-interim (ERA-5) time steps that AR conditions (based on AR shape) were found in the 4 grid points, the daily rainfall recorded between this period is considered to be AR-generated rainfall, and that day herein considered as a wet AR day. Unlike previous studies that any of the four grid points that AR conditions were present13 and rainfall in the next day10,13,29 (e.g., here the 16 June 2000, if any) considered as AR-precipitation event, only AR conditions presented at 4 grid points and rainfall occurred in the same day were considered as AR-generated rainfall in the present study.
Rainfall intensity under AR and non-AR conditions were compared by the median daily rainfall13 (calculated separately for days with and without AR conditions at each station, and the ratio was subsequently obtained). Further, the fraction of annual and seasonal highest 10% rainfall events that are attributed to ARs were also investigated.
Data availability
Data used in this study were obtained freely online:
ERA-Interim: https://apps.ecmwf.int/datasets/data/interim-full-daily
ERA-5:https://cds.climate.copernicus.eu/cdsapp#!/dataset/reanalysis-era5-pressure-levels?tab=overview
Daily rainfall: https://cliflo.niwa.co.nz/
Code availability
The Matlab code used for AR detection is in Waliser and Guan8.
The Python code and Excel VBA code used to compute AR frequency and quantify AR impacts on rainfall are available from the corresponding author upon request.
Acknowledgements
The authors would like to thank the National Institute of Water and Atmosphere Research (NIWA) for providing access to the New Zealand meteorological data from the National Climate Database and thank the European Centre for Medium-Range Weather Forecasts (ECMWF) for providing access to the ERA-interim and ERA-5 datasets.
Author contributions
Jingxiang Shu contributed all of the data analysis, results and figures interpretation, and the manuscript text and supplementary document writing. Asaad Y. Shamseldin and Evan Weller contributed the concept for the study, provided guidance on analysis, interpretation of results and figures results, and manuscript revision.
Competing interests
The authors declare no competing financial interests.
- Ralph, F. M., Dettinger, M. D., Cairns, M. M., Galarneau, T. J. & Eylander, J. Defining “Atmospheric River”: How the Glossary of Meteorology Helped Resolve a Debate. Bull. Am. Meteorol. Soc.99, 837–839 (2018).
- Newell, R. E., Newell, N. E., Zhu, Y. & Scott, C. Tropospheric rivers? - A pilot study. Geophys. Res. Lett.19, 2401–2404 (1992).
- Zhu, Y. & Newell, R. E. Atmospheric rivers and bombs. Geophys. Res. Lett.21, 1999–2002 (1994).
- Zhu, Y. & Newell, R. E. A Proposed Algorithm for Moisture Fluxes from Atmospheric Rivers. Mon. Weather Rev.126, 725–735 (1998).
- Stewart, R. E., Szeto, K. K., Reinking, R. F., Clough, S. A. & Ballard, S. P. Midlatitude cyclonic cloud systems and their features affecting large scales and climate. Rev. Geophys.36, 245–273 (1998).
- Catto, J. L., Jakob, C., Berry, G. & Nicholls, N. Relating global precipitation to atmospheric fronts. Geophys. Res. Lett.39, n/a-n/a (2012).
- Catto, J. L. & Pfahl, S. The importance of fronts for extreme precipitation. J. Geophys. Res. Atmos.118, 10,791-10,801 (2013).
- Waliser, D. & Guan, B. Extreme winds and precipitation during landfall of atmospheric rivers. Nat. Geosci.10, 179–183 (2017).
- Paltan, H. et al. Global Floods and Water Availability Driven by Atmospheric Rivers. Geophys. Res. Lett.44, 10,387-10,395 (2017).
- Dettinger, M. D., Ralph, F. M., Das, T., Neiman, P. J. & Cayan, D. R. Atmospheric Rivers, Floods and the Water Resources of California. Water3, 445–478 (2011).
- Rutz, J. J. & Steenburgh, W. J. Quantifying the role of atmospheric rivers in the interior western United States. Atmos. Sci. Lett.13, 257–261 (2012).
- Lavers, D. A. & Villarini, G. The contribution of atmospheric rivers to precipitation in Europe and the United States. J. Hydrol.522, 382–390 (2015).
- Viale, M., Valenzuela, R., Garreaud, R. D. & Ralph, F. M. Impacts of Atmospheric Rivers on Precipitation in Southern South America. J. Hydrometeorol.19, 1671–1687 (2018).
- Blamey, R. C., Ramos, A. M., Trigo, R. M., Tomé, R. & Reason, C. J. C. The Influence of Atmospheric Rivers over the South Atlantic on Winter Rainfall in South Africa. J. Hydrometeorol.19, 127–142 (2018).
- Neiman, P. J., Ralph, F. M., Wick, G. A., Lundquist, J. D. & Dettinger, M. D. Meteorological Characteristics and Overland Precipitation Impacts of Atmospheric Rivers Affecting the West Coast of North America Based on Eight Years of SSM/I Satellite Observations. J. Hydrometeorol.9, 22–47 (2008).
- Lavers, D. A. & Villarini, G. The nexus between atmospheric rivers and extreme precipitation across Europe. Geophys. Res. Lett.40, 3259–3264 (2013).
- Nayak, M. A. & Villarini, G. A long-term perspective of the hydroclimatological impacts of atmospheric rivers over the central United States. Water Resour. Res.53, 1144–1166 (2017).
- Tait, A. B. & Fitzharris, B. B. Relationships between New Zealand rainfall and southwest Pacific pressure patterns. Int. J. Climatol.18, 407–424 (1998).
- Kerr, T., Owens, I. & Henderson, R. The precipitation distribution in the Lake Pukaki catchment. J. Hydrol. New Zeal.50, 361–382 (2011).
- NIWA. Extreme weather - heavy rainfall. (2018). Available at: https://www.niwa.co.nz/natural-hazards/extreme-weather-heavy-rainfall.
- Gimeno, L. et al. Major Mechanisms of Atmospheric Moisture Transport and Their Role in Extreme Precipitation Events. Annu. Rev. Environ. Resour.41, 117–141 (2016).
- Guan, B. & Waliser, D. E. Detection of atmospheric rivers: Evaluation and application of an algorithm for global studies. J. Geophys. Res. Atmos.120, 12514–12535 (2015).
- Espinoza, V., Waliser, D. E., Guan, B., Lavers, D. A. & Ralph, F. M. Global Analysis of Climate Change Projection Effects on Atmospheric Rivers. Geophys. Res. Lett.45, 4299–4308 (2018).
- Scarsbrook, M. & Pearson, C. Water supply, floods and droughts – Te Ara Encyclopedia of New Zealand. (2008). Available at: https://teara.govt.nz/en/water-resources/page-1.
- NIWA. Preparing for future flooding : a guide for local government in New Zealand. (2010).
- Clark, A., Mullan, B., Porteous, A. & Clark, A. Scenarios of Regional Drought under Climate Change Prepared for Ministry of Agriculture and Forestry. (2011).
- Dee, D. P. et al. The ERA-Interim reanalysis: configuration and performance of the data assimilation system. Q. J. R. Meteorol. Soc.137, 553–597 (2011).
- Hersbach, H., Hersbach & H. The ERA5 Atmospheric Reanalysis. AGUFM2016, NG33D-01 (2016).
- Rutz, J. J., Steenburgh, W. J. & Ralph, F. M. Climatological Characteristics of Atmospheric Rivers and Their Inland Penetration over the Western United States. Mon. Weather Rev.142, 905–921 (2014).
{kind=link}
{kind=link}
{kind=link}
{kind=link}