Objective: Although various experimental studies have been conducted to develop a system to automate bone tunnel drilling in anterior cruciate ligament (ACL) reconstruction using robotic technology, no clinically useful, easy-to-use systems have become available yet. The purpose of this study is to facilitate accurate bone tunnel drilling under navigational control in ACL reconstruction.
Methods: We have built an arm probe with five degrees of freedom for measuring desired drilling positions. In this study, a Stewart platform was used to position drill pins in the trajectory of bone tunnels. We built a prototype robotic tunnel drilling system consisting mainly of a probe that locates femoral and tibial tunnel positions at the centers of ACL-bone junctions and a platform with a drilling device that can move three-dimensionally.
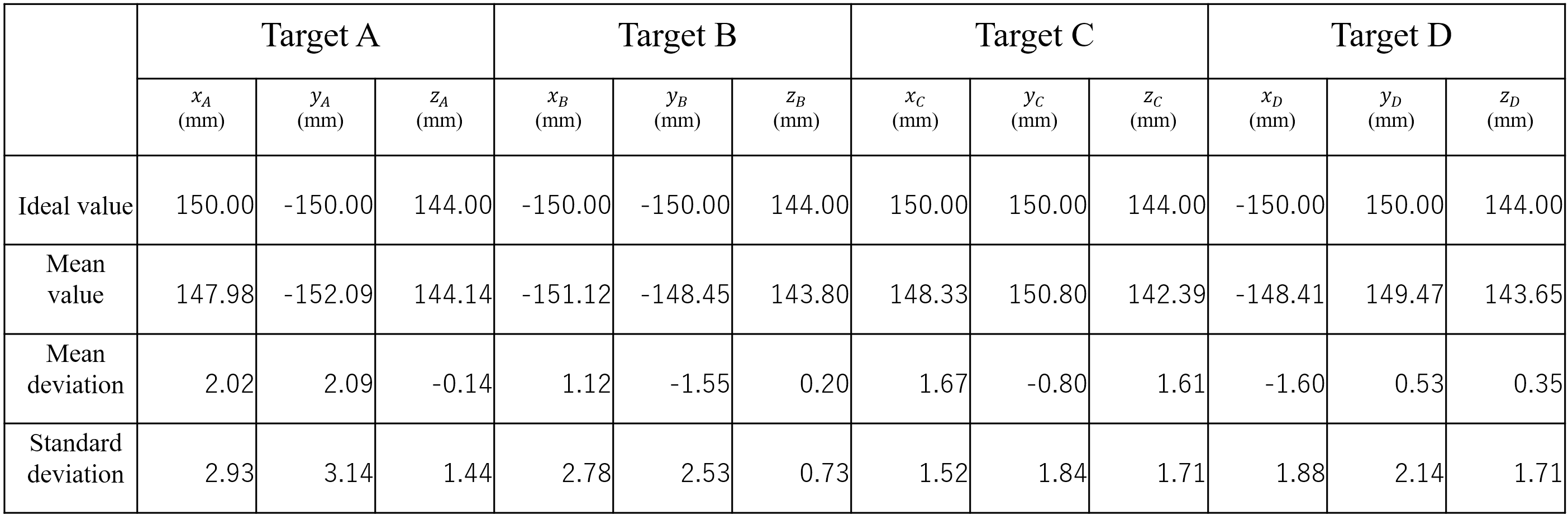
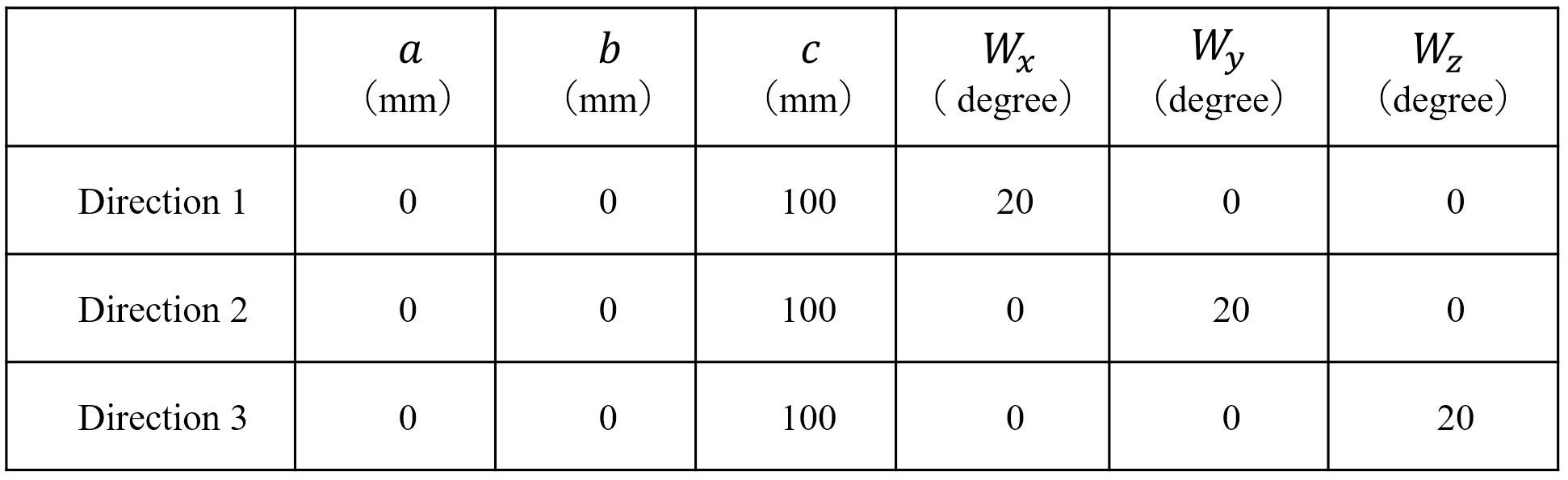
Results and Discussion: Regarding the actual positions (mm) and postures (degree) from target positions and postures in three directions, mean position deviations in all three directions were less than 1 mm and mean angles of deviation were between 0.1 to 0.2 degrees. Therefore, the Stewart platform was considered capable of highly precise positioning of the slide cylinder. In our study using a knee model, the prototype system enabled us to easily drill bone tunnels with high precision. We have also developed a space-saving model of this robotic arm system with software, which works better on an operating table. We are now conducting a study to verify its effectiveness and reliability.
{kind=link}
{kind=link}
{kind=link}