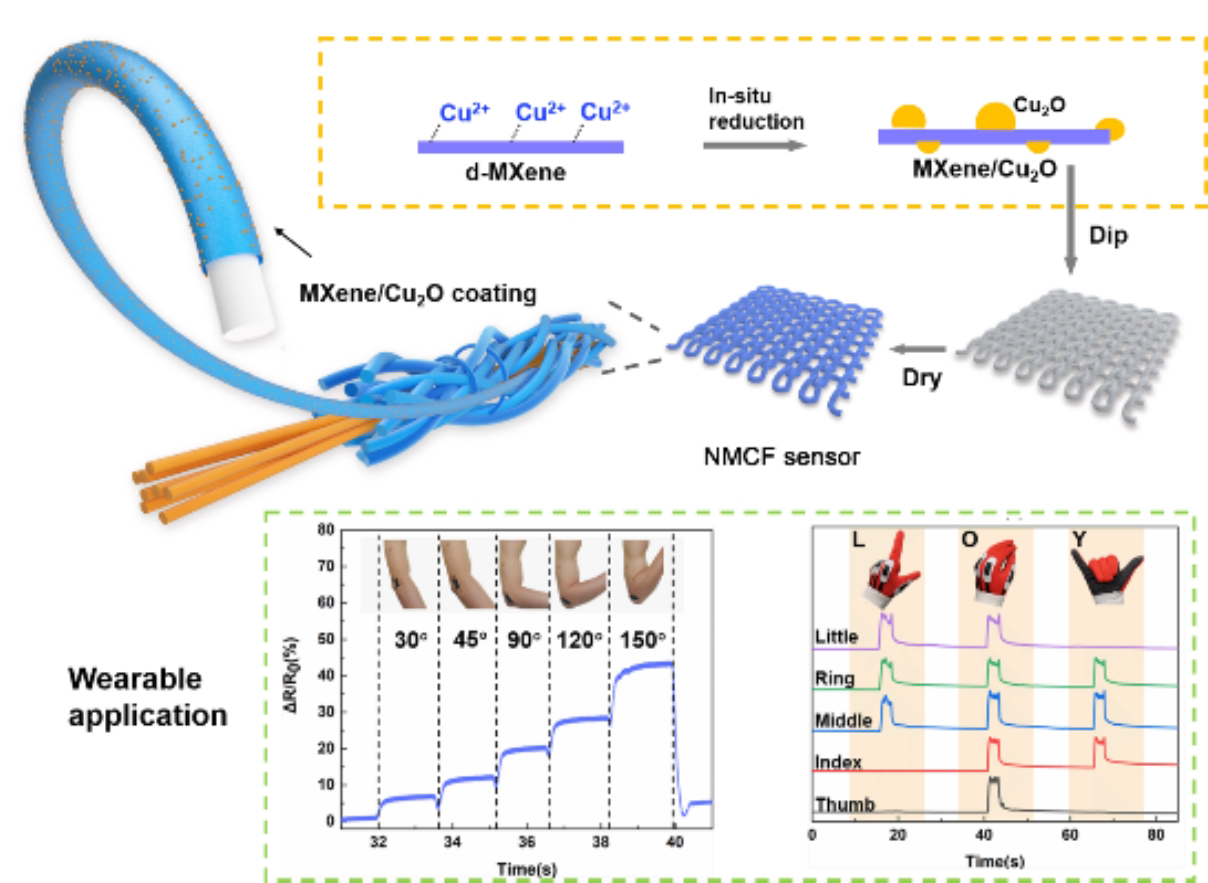
Synthesis and Characterization of MXene/Cu 2 O Nanocomposite.
Ti3C2Tx MXene nanosheets were prepared via HCl/LiF etching method, which was further applied to synthesize MXene/Cu2O nanocomposite (NMC) through liquid reduction method at room temperature (Fig. 1a) (detailed experiment in Supporting Information). As shown in the transmission electron microscope (TEM) image (Fig. 1b), the high transparency indicates the small thickness and the slightly stacked of the prepared MXene nanosheets with a 2D structure. The atomic force microscopy (AFM) image (Fig. 1c) shows the thickness of the MXene is ~ 2.4 nm, suggesting the monolayer feature(Yun et al. 2020). The substantial active sites and the high specific surface area on the surface of MXene nanosheets is favorable for the in-situ growth of Cu2O nanoparticles. The Cu2O nanoparticles with a diameter of 50 ~ 100 nm were successfully introduced on the surface of the MXene nanosheet, constructing the MXene/Cu2O nanocomposite as verified by the TEM image (Fig. 1d). Furthermore, the typical high-resolution TEM images show that clear lattice fringes of 0.246 and 0.214 nm respectively corresponding to (111) and (200) facets of Cu2O (Fig. S1a). The MXene/Cu2O nanocomposite has been coated onto the fabrics (NMCF) to form the conductive textile via a hot-blast dip-dry method. Typically, the weaving structure of the fabric (the content of MXene/Cu2O is 1.4wt%) is clearly visible as presented in the scanning electron microscope (SEM) image (Fig. 1e), suggesting the successful preparation of MXene/Cu2O nanocomposite-based fabric. As shown in Fig. 1f, MXene/Cu2O uniformly forms a film on the surface of cotton fiber via dip-drying and baking at 150°C for 3 min process. The corresponding EDS mapping images (Fig. S2) show that MXene/Cu2O have nearly a homogeneous distribution across the conductive surface. The 2D MXene nanosheets and Cu2O nanoparticals are clearly observed in high-resolution SEM (Fig. 1g), indicating that the MXene/Cu2O nanocomposite is uniformly deposited on the cotton fiber.
The crystal structure of MXene/Cu2O composite was further analyzed by X-ray diffraction (XRD) patterns (Fig. 1h). The characteristic peak (104) at 39° of Ti3AlC2 disappeared (green curve) after the etching process by HCl/LiF solution and sonication treatment, confirming completer movement of the Al atoms. Meanwhile, the (002) peak of Ti3AlC2 at 2θ = 9.6° shifts to around 6.2° due to the expansion of the 2D MXene-basal plane, further confirming the formation of Ti3C2Tx(Liu et al. 2017). Moreover, the diffraction peaks at 29.7°, 36.5°, 42.3°, 61.5° and 73.9° can be indexed to the cubic phase of Cu2O (JCPDS-05-0667) (Azimi et al. 2014), suggesting the formation of the MXene/Cu2O nanocomposite. As given in Fig. 1i, the X-ray photoelectron (XPS) spectra confirm the presence of Ti, C, O, and Cu elements in the MXene/Cu2O nanocomposite, which is consistent with XRD results. The corresponding elemental mapping images (Fig. S1b) confirm the high-density distribution of Cu and O elements on the surface of Ti elements, indicating the successful introduction of Cu2O on the surface of MXene. The high-resolution XPS spectrum of Ti 2p (Fig. 1j) demonstrates two dominant peaks of C-Ti-Tx 2p3/2 at 457.5 eV and C-Ti-Tx 2p1/2 at 463.2 eV, indicating the presence of terminal groups on MXene nanosheets(Wang et al. 2016). The fitted peaks of Ti 2p located at 456.9 (461.7), 457.6 (463) and 458.3 (464.1) eV, respectively, correspond to Ti-C, Ti2+ and Ti3+(Liu et al. 2018). Compared with the pure MXene nanosheets, the two main peaks at 463.3 (Ti 2p1/2) and 457.5 (Ti 2p1/2) display a positive shift in the XPS spectrum of the MXene/Cu2O nanocomposite (Fig. S3), which confirms the formation of the strong interaction network between Cu2O and MXene.The primary peaks at 932.2 and 951.9 eV, as shown in Fig. 1k, correspond to Cu 2p3/2 and Cu 2p1/2, respectively, and are attributed to Cu2O(Tian et al. 2014). Moreover, the two extra weak peaks at 933.4 eV and 953.5 eV are attributed to the Cu2+ of Cu 2p1/2 and Cu 2p3/2 in the material, indicating the slight oxidation of Cu2O during the liquid reduction process(Li et al. 2018). For a short conclusion, the MXene/Cu2O nanocomposite was finely prepared and successfully introduced into the cotton fabric to form the conductive fibers.
Conductivity of Conductive Textile.
The amount of the prepared MXene/Cu2O nanocomposite on the conductive textile could be modulated via the dip-dry times in the scalable dip-dry method (Fig. S4a). The amount of MXene/Cu2O nanocomposite on the surface of the conductive textile enhances from 0.51 to 1.4 wt% through 1 to 5 dip-dry times in a scalable dip-dry process. Accordingly, the corresponding surface resistance of the conductive textile decreases from 3.9 to 0.6 kΩ/sq (Fig. S4b). The larger surface resistance value of the conductive textile with the lower load amount of the MXene/Cu2O nanocomposite indicates the inhomogeneous conductivity of the fabric, which is caused by a discontinuous conductive layer on the fiber after one single dip-dry process. Interestingly, the fabrics after 5 times dip-drying process have the best washable property, and the surface resistance is still lower than 5 kΩ/sq after 100 washings (Table S1), suggesting the attractive robustness as a fabric sensor. The MXene/Cu2O nanocomposite-based fabric sensor is integrated into a closed circuit as a stretchable conductor. During the increasing amount of MXene/Cu2O nanocomposite from 0.51 to 1.4 wt%, the LED lamps become more bright (Fig. S5a). Correspondingly, the color of the conductive fabric changed from gray to black (Fig. S5b), the softness and flexibility of the prepared conductive cotton fabric show almost no change after the dip-dry process.
Sensing Performances of the Conductive Fabric.
The conductive features of the prepared conductive fabric were evaluated depending on the homemade test circuit (Fig. S6), which is beneficial for the further investigation of the corresponding sensing performances. The relationships between the relative resistance value (R-R0/R0) of the conductive fabric and the dynamic strain were demonstrated in Fig. 2, where R and R0 are the resistance of conductive fabric with or without the external stress, respectively. As shown in Fig. 2a, the resistance of the prepared conductive fabric with 0.51 wt % MXene/Cu2O nanocomposite increased dramatically under strain, suggesting the sensitive electrical response. With 1.16 wt% MXene/Cu2O nanocomposite loading, the conductive fabric presents a smaller change in electrical resistance under strain, which is clarified the better conducive stability. For a higher loading ratio of 1.40 wt%, the MXene/Cu2O nanocomposite coating on the fiber is thicker and leads to the formation of the denser network for a better conductive. Furthermore, the gauge factor (GF) of the conductive fabric is calculated via the equation: GF = ΔR/(R0·ε) ×100%, where ε is the strain (expressed as a percentage) (Liu et al. 2015). As presented in Fig. 2b, the GF curves exhibit good linearity under 0 ~ 100% strain, which is guaranteed work stability under the whole sensing range. As well as the GF values of sensing range corresponding to the strain range of 0–20%, 20–80%, and 80–100% are − 1.12, -1.42, and − 0.94, respectively, suggesting the sensitive response for both the low and high-level strain. It is noteworthy that the conductive sensitivity of the functional fabric also could be influenced by tensile speed (Fig. S7). Typically, the ΔR/R0 value is decreased from − 50 to -40 with the strain rate increasing from 0.1 to 2.0 mm/s under the strain of 40%. As shown in Fig. 2c, the relative resistance variation of the conductive fabric under 20% strain with the strain rates of 0.005 ~ 1 Hz (the strain rates of 0.1 ~ 20 mm/s corresponding to the stretching frequencies from 0.005 ~ 1 Hz) displays no frequency dependence. The cyclic response of conductive fabric presents the uniform signal output during tuning the strain rates. Remarkably, the corresponding response stability of electrical signals is of vital importance for their practical application of wearable devices(Shi et al. 2018). The conductive fabric demonstrates a uniform and continuous response of the resistance for the strain range from 10–70% as verified in Fig. 2d. Importantly, the symmetric curves during loading and unloading steps imply that the quick resistance recovers as the strain changes, which is a desired property for in situ tests of the strain. The resistance change of the conductive fabric during the bending or compression process is detected by the test system of Fig. S8a and b. The bending angle of the conductive fabric is recorded as α, which is a positive value when bent and a negative value when compressed. From Fig. S8c and d, the conductive fabric has a resistance change in the range of -90-90°, and the response within 0–90° is obviously stronger than − 90 − 0°, the resistance response of the conductive fabric exhibits good repeatability and stability in each cycle during periodic bending or compression. There is slight friction at the interface in the textile constructure under sliding conditions. Thus, the conductive fabric shows desirable maintenance after 3000 cyclic tests under the 20% strain, except for a small attenuation of the signal (Fig. 2e). Compared with the pure fabric, the coated MXene/Cu2O layers play a key effect in increasing the mechanical strength of the conductive fabric (Fig. S5c). Hence, the efficient conductive network and the enhanced mechanical strength was successfully achieved via loading MXene/Cu2O onto the textile substrate. The real-time strain response was assessed based on the intensity relationship between the relative resistance value and the responded time through offering a rapid response in a quick stretching and release process. As shown in Fig. 2f, the response time of the stretching and release process are 110 and 80 ms, respectively. The low latency for signal acquisition is critical for monitoring human motion monitoring. The stretch of the conductive fabric is maintained at 10%, 30%, and 50% (Fig. S9a), the resistance value of the conductive fabric remains constant. It shows that the resistance of the conductive fabric has good stability under creep conditions. As shown in Fig. S9b, a sharp change in conductive fabric resistance was observed when the tensile force was applied in the initial stage, and the resistance remained basically unchanged when the tensile force was constant. The results show that the resistance of the sensor is not affected by stress relaxation, and the stability of the sensor signal output can be guaranteed. Therefore, the prepared conductive fabric has excellent strain sensing properties, which is a promising building block for the wearable device.
The alternating current impedance analysis result of the conductive fabric is shown in Fig. S10. The phase angle is maintained at 0° in the mid-low frequency range from 1 to 103 Hz, indicating that the conductive fabric maintains the characteristics of pure resistance without capacitance and inductance effects (Fig. S10a and S10b)(Sharma et al. 2021). Numerical fluctuations appear in the high frequency range, which is caused by the scan time being too short when scanning in the high frequency range. The impedance Z' of the conductive fabric remains basically unchanged, showing a straight line (Fig. S10c). The introduction of Cu2O in MXene/Cu2O only reduces the resistance of MXene/Cu2O conductive fabrics, has not changed their properties as pure resistive elements. Which is due to reducing the specific gravity of MXene nanosheets under the same loading conditions. Correspondingly, when the content of MXene/Cu2O is increased from 0.48 to 1.36 wt% (Fig. S10d), the resistance of the conductive fabric decreases, and the characteristic of the pure resistance element of the conductive fabric is not will change. Therefore, it can be considered that the work of the prepared MXene-based conductive fabric is mainly based on the principle of resistive sensing. Furthermore, the relationship between the microstructural change of the conductive fabric and external tensile force is useful to further study the sensing mechanism. The micrograph and a diagrammatic sketch of the conductive fabric are presented in Fig. 2g and 2h. By applying an external force, tensile strain generates a larger contact area between yarns than that of the initial state, forming more conductive pathways to decrease the electrical resistance (Fig. 2g). Furthermore, as the elongation continues to increase, the yarn becomes more compacted and thinner with a highly stretched state under the larger strain (Fig. 2h), the increment of the contact area between the cotton fibers in a yarn could reduce the resistance. Significantly, the resistance change is mainly ascribed to the microstructure changes in the textile network under the external forces, leading to an effective force-sensitive component for the conductive fabric. The conductive fabric serves as a textile-based efficient conductive network with pretty sensing ability, natural comfort, which can well satisfy the practical demands of the flexible and stretchable sensors. Inspiring the excellent strain sensing properties of the conductive fabric based on MXene/Cu2O nanocomposite, a strain sensor is assembled on an elastic fabric substrate, the copper electrode and conductive fabric are bonded with silver paste, and the contact points are fixed with elastic fabric (Fig. 2i). Based on the strain sensor module, the integrated and portable strain sensors were constructed as shown on the right of Fig. 2i. The manufactured strain sensors are predicted to capture and analyze the detailed process of various human activities due to their desired strain detecting behavior.
As a proof-of-concept, the prepared strain sensor was attached to the corners of the mouth and throat to monitor small-scale human physiological activities of the facial expression and the muscle motions near the throat via a tester to noninvasively. As presented in Fig. 3a and 3b, the sensor-generated two discernable characteristic current patterns according to the smiling and swallowing actions. This is an attribute to each action caused specific form of movement of corners muscle at the mouth and throat, resulting in a distinguishable resistance change signal. The significant characteristic difference between these resistance change signal indicates that the strain sensor has the potential as a voice and expression recognition devices. The electrical signals are almost identical during each smiling and swallowing cycle, manifesting the sensitivity and stability of the strain sensor. Aside from detecting small-scale physiological activity, the strain sensor also could be employed to monitor the joint action of bending wrist, finger, elbow, and leg due to their good stretchability. As shown in Fig. 3c, the strain sensor-generated two characteristic current signals for the response of the wrist bending and straightening activities. Similarly, the relevant characteristic signals for the bending/straightening activities of the finger and leg could also be obtained as verified in Fig. 3d and 3e. Furthermore, for responding to repeated motion, essentially invariable resistance change patterns were obtained, demonstrating that strain sensors for wearable devices had outstanding repeatability and reliability in practical applications. Notably, the bending/straightening activities of the arm, such as keeping the bending angles of 0°, 30°, 45°, 90°, 120° and 150° for a few seconds, also could be fine tested (Fig. 3f). This elucidates that the strain sensor could perceive different motion amplitudes.
Smart Sensing Glove Detect and Recognize Gesture Signals.
Considered their outstanding sensitivity, reproducibility and durability, the strain sensors were further made into wearable sensors and integrated into a versatile strain-sensing platform, such as the smart sensing glove (Fig. 4a). The smart sensing glove is useful to detect and recognize gesture signals for the communication needs of hearing-impaired people to realize barrier-free communication. Through wearing the prepared sensing glove, the strain sensors were attached to the joints of the thumb, index finger, middle finger, ring finger and little finger, which is applied to read the sign language via a more convenient method. Its circuit diagram is shown in Fig. 4b by which the voltage variation is measured. As given in Fig. 4c, the smart sensing glove generates different characteristic current patterns associated with the gesture signals of "1", "2", "3", "4", and "5". The simple letters of "C", "S", "L", "O", and "Y" also could be translated and presented (Fig. 4d). Importantly, these sign languages could be quickly cached in a continuous test-time, indicating good sensitivity. Furthermore, the combination of sensor array and glove can realize more accurate gesture recognition, further supporting the application prospects of MXene/Cu2O nanocomposite-based conductive fabric strain sensor on electronics and biomedical devices.
Breathability and Antibacterial Properties of the MXene/Cu 2 O Nanocomposite-based Fabric Sensor.
In addition to sensing performance, the strain sensor also exhibits great wearability including breathability and antibacterial properties. The bactericidal activity of the MXene/Cu2O nanocomposite-based fabric sensor was evaluated via 24 h shake flask test. The bacteria colonies showed that samples with pure MXene have no obvious antibacterial activity against Escherichia coli (E. coli) and Staphylococcus aureus (S. aureus) in comparison with MXene/Cu2O nanocomposite-based fabric (Fig. 5a). While the bacteriostatic rates of S. aureus and E. coli were 96.3% and 81.3% respectively, when the MXene/Cu2O content is 1.16 wt%. Samples with loaded MXene/Cu2O of 1.4 wt% show the highest bacteriostatic rates, which were 99.1% to E. coli, 96.3% to S. aureus (Fig. 5b). The strain sensor showed stronger inhibitory activity against S. aureus than E. coli. The introduction of Cu2O has substantially improved the antibacterial ability of the strain sensor. More interestingly, the treated fabric still remains an excellent air permeability of 233.75 mm/s with a margin drop from 297.5 mm/s (Fig. 5c) after one dip-dry process, even after being treated 5 times, the fabric still remains desirable breathability (190 mm/s). The results have revealed that MXene/Cu2O nanocomposite-based fabric sensor possesses a great advantage in smart sensing while creating a skin-friendly and sterile environment on the skin-sensor interface, ensuring favorable wearability as a wearable sensor.
{kind=link}