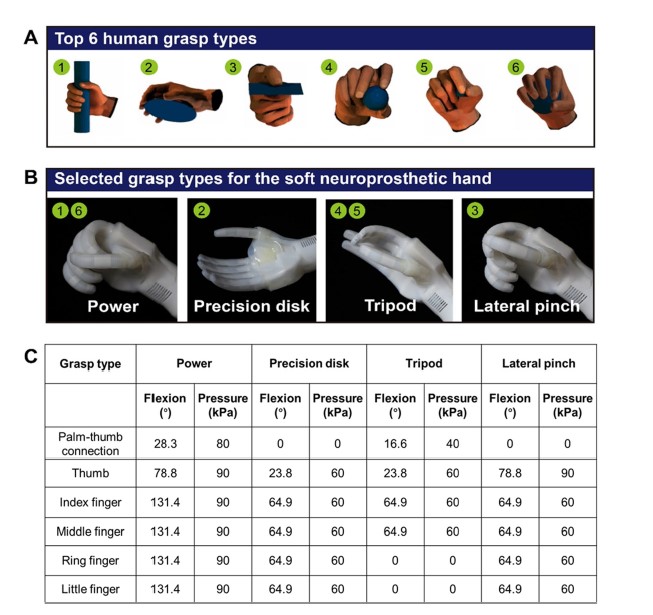
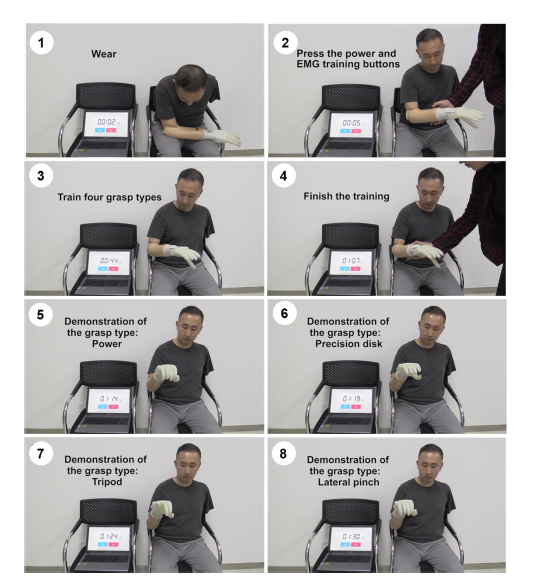
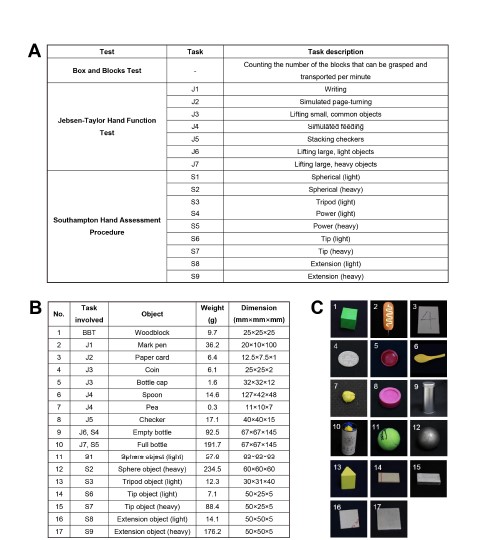
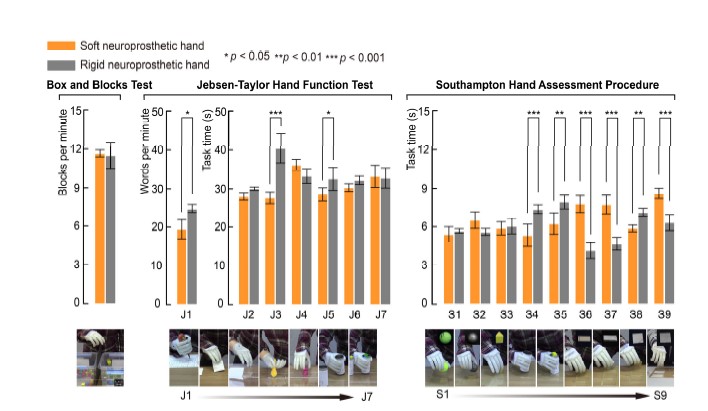
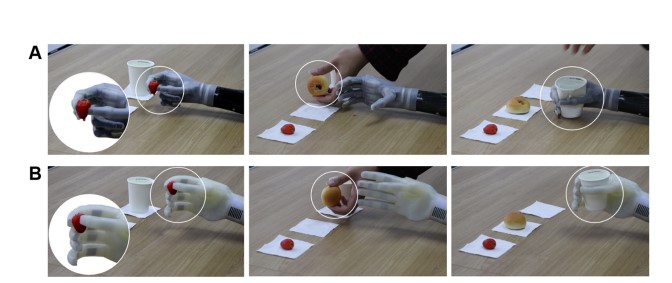
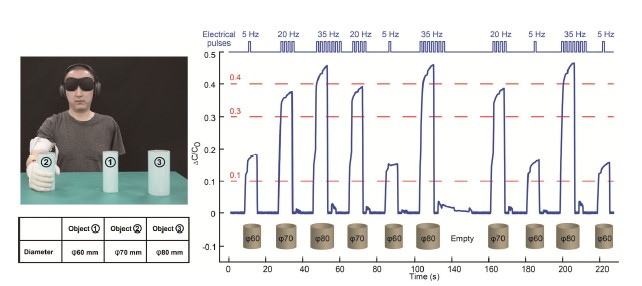
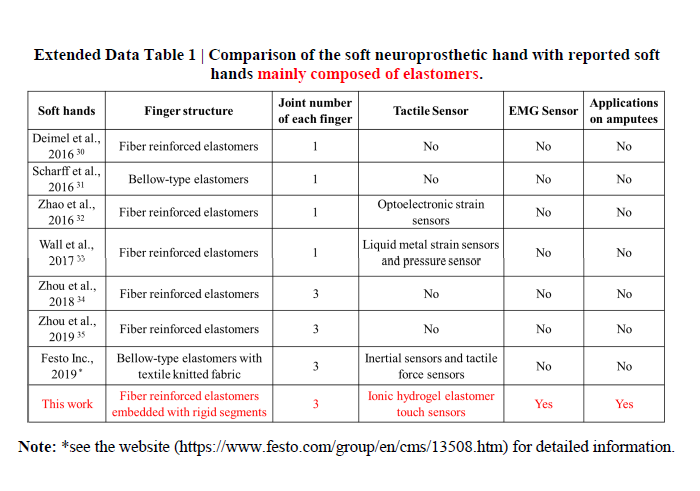
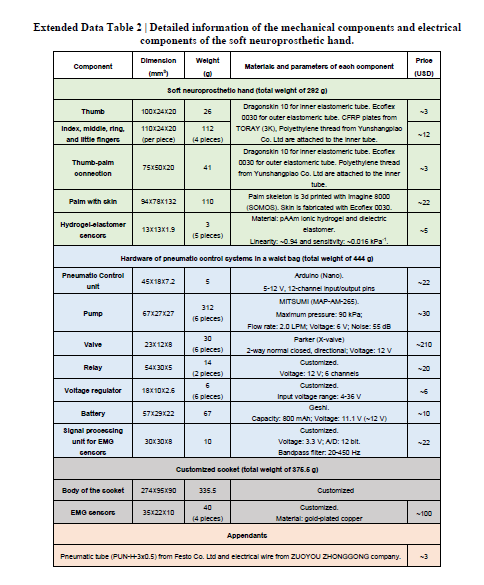
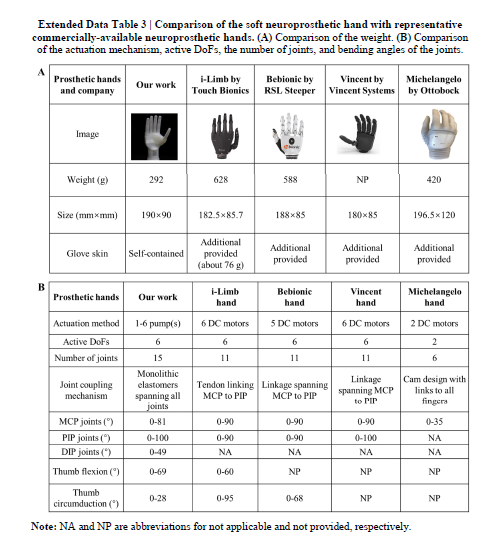
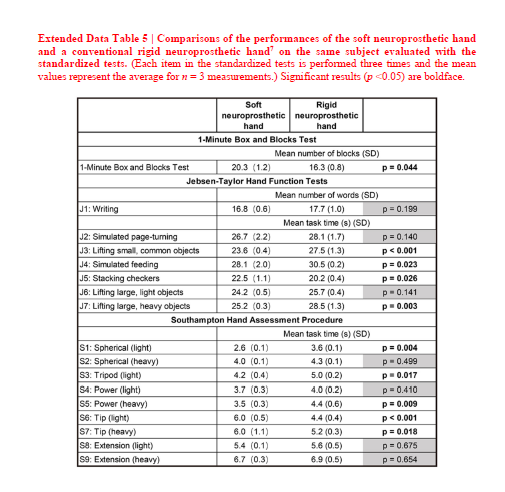
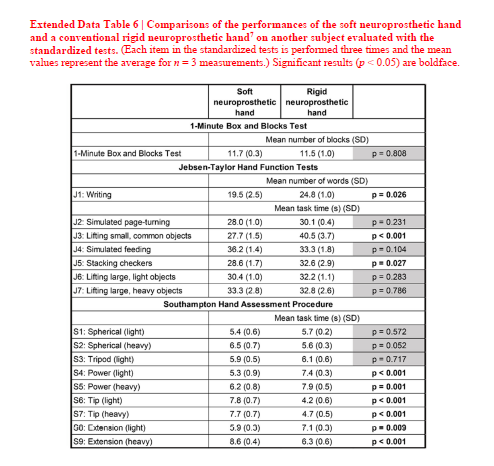
Mainly composed of electrical motors and sophisticated mechanical components, existing neuroprosthetic hands1,2 are typically heavy (>400 g) and expensive (>USD 10,000), and they lack the compliance and tactile feedback of human hands. These limitations hamper neuroprosthetic hands’ innovation and broad utility for amputees3-5. Here we report the design, fabrication and applications of a lightweight (292 g) and potentially low-cost (component cost below USD 500) soft neuroprosthetic hand with simultaneous myoelectric control and tactile feedback. The soft neuroprosthetic hand consists of five soft fingers and a palm to give six active degrees of freedom under pneumatic actuation, four electromyography sensors that measure the surface electromyogram signals to control the hand to deliver four common grasp types, and five hydrogel-elastomer capacitive sensors on the fingertips that measure the touch pressure and elicit electrical stimulation on the skin of the residual limb. The soft finger is made of a fiber-reinforced elastomeric structure embedded with rigid segments to mimic the soft-joint/rigid-bone anatomy of the human finger. We use a set of standardized tests6 to compare the speed and dexterity of the soft neuroprosthetic hand and a conventional rigid neuroprosthetic hand7 on two transradial amputees. The soft neuroprosthetic hand gives overall superior performances to the rigid hand. We further demonstrate that one transradial amputee wearing the soft neuroprosthetic hand can regain the versatile hand functions with primitive touch sensation and real-time closed-loop control in daily activities such as handling tools, eating, shaking hands, petting animals, and recognizing touch pressure. This work not only represents a new paradigm for designing soft neuroprosthetic devices but also opens an avenue to widespread applications of lightweight, low-cost, and compliant hand replacements for amputees.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}